
引子
好的,我们现在开始设计第一个机器人:对小七的博客进行批量点赞。
首先,我们需要明确机器人的执行目标和执行动作。执行目标就是小七发表过的帖子,而执行动作就是点赞。
一、机器人流程梳理
梳理机器人的执行流程是配置任何一个机器人的重要步骤,特别是对于咱们这些新手来说,养成良好的流程梳理习惯能够极大地提高机器人配置的效率和质量。
在实际操作中,很多经验丰富的RPA用户可能会因为对工具的熟悉和对业务流程的深刻理解而直接开始配置,但这并不意味着他们可以完全跳过流程梳理这一步。即使对于老手来说,清晰的流程梳理也有助于他们更好地理解和优化机器人的设计。
对于复杂的流程,如果没有提前进行清晰的梳理,很容易在配置过程中出现混乱或遗漏,导致机器人的功能不完整或性能不稳定。而且,一旦流程没有梳理清楚,后期的调试和修改工作也会变得异常复杂和耗时。
因此,建议新手在学习RPA配置时,一定要重视流程梳理这一环节。可以先用流程图或文字描述的方式将机器人的执行流程清晰地呈现出来,然后再根据这个流程来逐步配置机器人。这样不仅能够保证机器人功能的完整性和稳定性,还能够提高配置效率,减少后期的工作量。
同时,养成良好的流程梳理习惯也有助于新手逐渐积累经验和提升技能。通过不断地梳理和优化流程,新手可以逐渐熟悉和掌握RPA的设计方法和工具使用技巧,从而在未来的学习和实践中更加得心应手。
1、根据人工动作抽象出机器步骤
这里的关键是把人工的关键动作具体描述出来。
这里小七先梳理一下这个RPA机器人的执行流程:
1.1 寻找并点击「点赞」按钮:
在小七的博客心流页面 搜索「利好」按钮。
如果找到「利好」按钮,则点击它。
如果没有找到「利好」按钮,则进入下一步。
1.2 等待并滚动页面:
等待1秒(1000毫秒)。
执行鼠标滚轮向下滚动5次操作。
1.3 重复上述步骤:
重复步骤1和步骤2,直到没有更多的「利好」按钮可以点击
1.4 输出提示信息:
在完成所有点赞操作后,输出「五节小课搞定RPA入门正式开启」。
这个流程已经非常清晰了,接下来我们就可以根据这个流程来配置RPA机器人了。在配置过程中,我们需要注意确保机器人能够准确地识别并点击「点赞」按钮,同时也要确保滚动操作的准确性和稳定性。此外,我们还需要为机器人设置适当的等待时间,以避免因为操作过快而导致的失败或错误。
2、如何配置机器人
2.1 机器人模块组装图
2.1.1 配置一个最基础的点赞机器人
这个是最笨的一个机器人,具体埋个引子,答案在下方。
最简单的就是在搜索命令框输入for ,搜索到的 【从初始值开始按计步长计数】 模块拖入中间的组装区。

如果各位铁子还不是很熟悉界面操作,可以在在模块区一步一步来,一级一级找到从初始值开始按计步长计数 (基本命令 > 词法语法 > 从初始值开始按计步长计数 ),找到后直接拖拽到中间的组装区,后面的步骤也可以自己找一下,这里只是提供一个快速熟悉界面的一个思路。
在 【从初始值开始按计步长计数】 流程块下放置 点击图像
设置小七博客心流页面的 利好 为目标图像

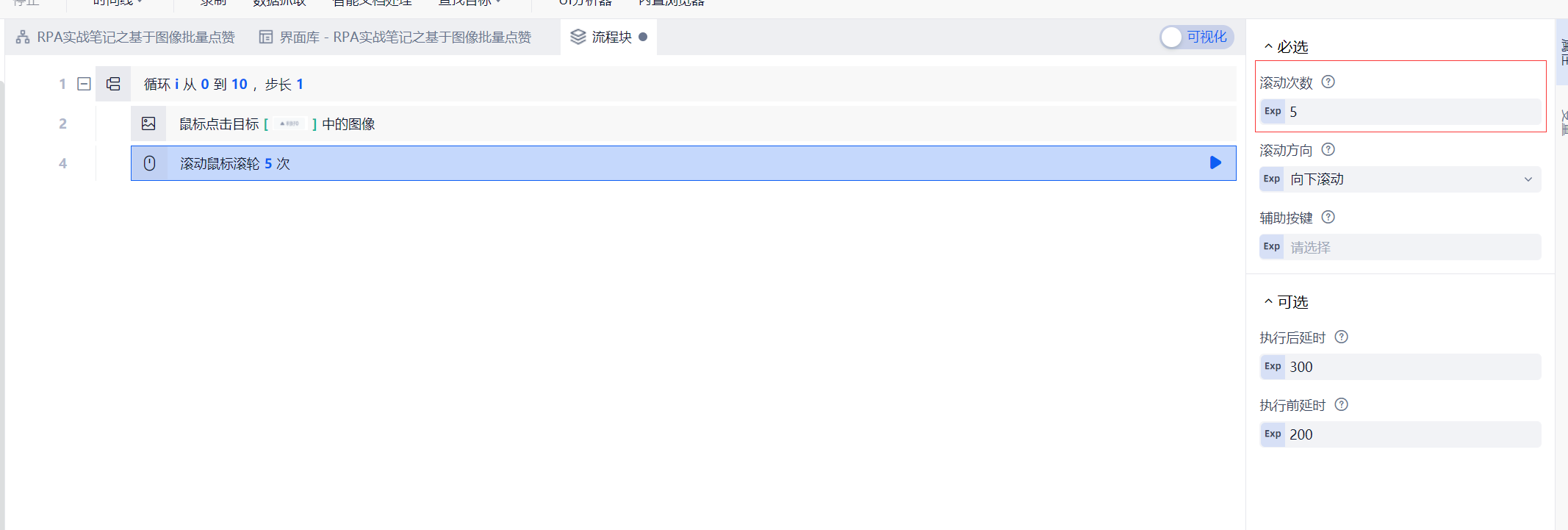
设置【模拟滚轮】,滚动次数设置为5,设置5其实是为了下一步更好的理解,正常的话,设置2就可以了,具体要依据实际页面而定
开始运行咱们的第一个点赞机器人, 按F5键快捷启动。
这是最基础的点赞机器人,在运行过程中,我们会发现,实际执行中,闲的很呆,但是小七感觉这是很有必要的,下面小七为大家继续演示更为高效的点赞方式。
如果还是有点懵,可以看一下这个视频
知识点总结
下面,对照着自己完成的机器人配置页面,我们一起来看看,无形中我们已经掌握了哪些知识点,理解了它们,我们就能举一反三设计更多同类型机器人。
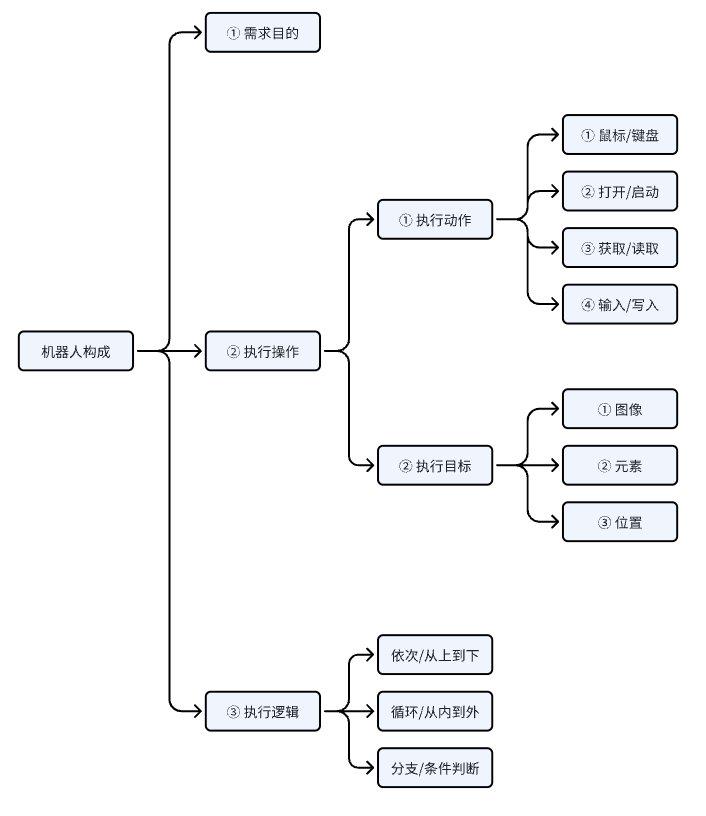
还记得我们前面讲过,完备性的机器人包含 2 大要点:
- 「执行操作」:包含对「执行目标」「执行某个动作」。 执行目标:常见的有 2 种,图像目标和元素目标。 执行动作:常见的有 4 种,鼠标/键盘、启动/打开、输入/写入、读取/获取 它们总是一起出现,比如,打开某个图像,输入某段内容,读取某个元素等等。 •
- 「执行逻辑」:是指按照怎样的规则重复动作,常见的逻辑有3种:循环/判断/依次 用思维导图表示就像这样:
每个具体的「执行操作」和「执行逻辑」都是通过一模块、二摆放、三设置来实现的。
首先,第 1 个机器人用到了 3 种「执行操作」,即「执行目标」+「执行动作」,使用到的 3 个模块以及配套设置。
「点击图像」模块
机器人配置的第一步,点击“点赞”按钮,我们用到了「点击图像」模块。
含义和使用场景:
- 「点击图像」,顾名思义,代表 「点击某个图像」这个行为。只要工作流程中涉及点击图像这个动作,都可以使用这个模块。
「点击图像」模块的属性设置
- 大多数情况下,无需修改点击图像模块的属性。前面的点赞机器人对属性做了 3 处修改。
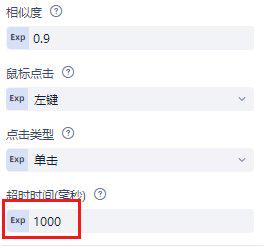
第 1 处:超时时间
该处默认设置为「10000」。
它代表着:在当前页面找不到未点赞按钮时,需要等待 10 秒(10000毫秒)。
前面我们修改为「1000」,意味着只需要等待 1 秒,就可执行下一步操作。
第 2 处:错误继续执行
该处默认设置为「否」。
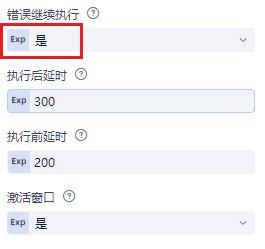
它代表着:在当前页面找不到未点赞按钮时,直接报错,从而中断机器人运行。
前面修改为「是」,代表着:当前页面找不到未点赞按钮时,用最简单粗暴的方式跳过,直接进入下一个模块的运行。
也就是说,当页面中找不到未点赞按钮时,虽然不会报错中止运行,但也不会产生一次「真正的点击」,直接继续往下滑动。
第 3 处:匹配方式

该处默认设置为「灰色匹配」,即不通过颜色来匹配图像,也就是根据图像形状来匹配。
点赞按钮需要通过颜色来识别是否为「未点赞按钮」,所以,需要修改为「彩色匹配」。
机器人配置的第二步,模拟鼠标滚轮 5 次,我们用到了「模拟滚轮」模块。
「模拟滚轮」模块
含义和常用场景:
- 顾名思义,就是模拟鼠标的滚轮滚动。
「模拟滚轮」模块的属性设置
- 一定要设置的属性有两个,一是滚动次数,二是滚动方向。
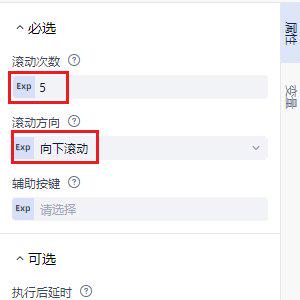
里滚动次数5,滚动方向是向下滚动,意味着每次鼠标要向下滚动5次。
这个点赞机器人使用的是图像方式选择目标,非常依赖当前屏幕界面的展示。也就是说,不在当前屏幕中,都将选择不到,如果为了确保每个点赞按钮不被错过,这里的滚动次数设置小一点,甚至设置为 1 都是可以的。
机器人配置的第三步,重复 1-2 步骤,我们用到了「计数循环」模块。
「计数循环」模块
含义和常用场景:这个模块,用来控制动作循环的次数。
「计数循环」模块的属性设置:
这个模块的属性里有 3 个可以改变的配置,【初始值】代表开始的数字,【结束值】代表结束的数字,【步长】代表每次重复间隔多少。

举个例子,大家就明白啦~
循环 i 从 0【初始值】 到 10【结束值】,【步长】 1。
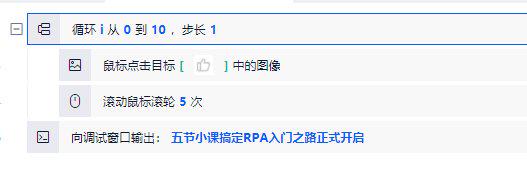
就代表,从 0 到 10 一共 11 个数字,每个数字之间间隔 1 。
也就是:0、1、2、3、4、5、6、7、8、9、10。一共就是循环11次。 自我考察一下:
从 0(初始值) 数到 10(结束值),每次间隔 3(步长),需要数(循环)多少次呢?
答案是:4 (每次取值:0,3,6,9)
「计数循环」模块的位置摆放
如果需要某个模块重复运行,则需要将该模块放置在循环模块中。
比如,前面讲到的,鼠标点击目标和滚动鼠标滚轮就要放在循环模块下面。
对于咱们新手来说,建议先配置循环模块的内部模块,再配置循环模块。循环内部模块能够正常运行后,再添加一个循环模块把它们包裹起来。
学完了3个「执行操作」类模块,我们来看最后一个「执行逻辑」
机器人的执行逻辑
机器人执行逻辑遵循三个原则
- 从上到下
- 从里到外
- 条件判断
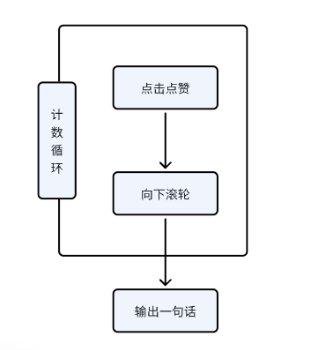
本节课配置的机器人涉及到了「从上到下」「从里到外」这两个原则

从上到下:指机器人先运行上面的模块,再运行下面的模块(见上图 ① 标注)
从里到外:指机器人先运行完里面的模块,然后才会运行外面的模块(见上图 ② 标注)
如上图,「点击图像」「模拟滚轮」在「计数循环」里面,那么会受到「计数循环」的控制,需要重复运行 11 次之后才会执行外面的「输出调试」
这里的「输出调试」模块并不会对该机器人运行产生任何影响,只是为了方便大家了解机器人的流程执行顺序。在循环执行结束后,最后输出 1 次「五节小课搞定RPA入门之路正式开启」。
你可以尝试把「输出调试」模块放到「计数循环」模块内,看看会发生什么?
答案是:会输出 11 次「五节小课搞定RPA入门之路正式开启」
